Linear Quadratic Regulator (LQR) Control for the Active Suspension System of a Four-Wheeled Agricultural Robot
Jheremy Andre Bazan Quispe, Ricardo Jesus Huaman Kemper, and Sixto Ricardo Prado Gardini
In 2023 IEEE XXX International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Lima, Peru, 2023
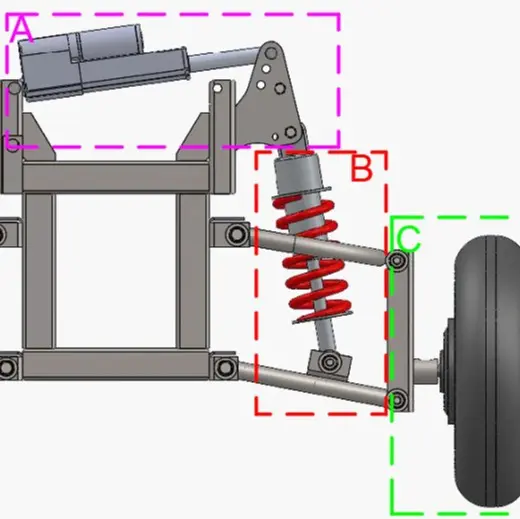
As the adoption of robotics within the agricultural industry increases, the issue of maintaining stability and precise task execution on irregular terrain has emerged as a critical challenge. To address this, this study introduces a control strategy for enhancing the suspension system of an agricultural mobile robot. A dynamic model, characterized in the state-space representation, was formulated to encapsulate the robot’s suspension dynamics. This model was then interfaced with a Linear Quadratic Regulator (LQR) for optimized control. Performance evaluations were conducted using MATLAB/Simulink, and two contrasting road profiles were employed to simulate agricultural terrains. When compared to the passive counterpart, the active LQR-controlled suspension presented substantial improvements. Specifically, for the initial road profile, the roll angle, pitch angle, and vertical acceleration showed improvements of 40.68%, 39.47%, and 37.73%, respectively. On the second road profile characterized by depressions, these metrics improved by 52.02%, 66.97%, and 71.03%. Consequently, the proposed LQR control strategy enhances the robot’s stability and precision on challenging agricultural terrains by reducing oscillations and minimizing stabilization time.
 Artificial vision strategy for Ripeness assessment of Blueberries on Images taken during Pre-harvest stage in Agroindustrial Environments using Deep Learning TechniquesIn 2023 IEEE XXX International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Lima, Peru, 2023
Artificial vision strategy for Ripeness assessment of Blueberries on Images taken during Pre-harvest stage in Agroindustrial Environments using Deep Learning TechniquesIn 2023 IEEE XXX International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Lima, Peru, 2023